[This work is based on this course: Artificial Intelligence for Business.]
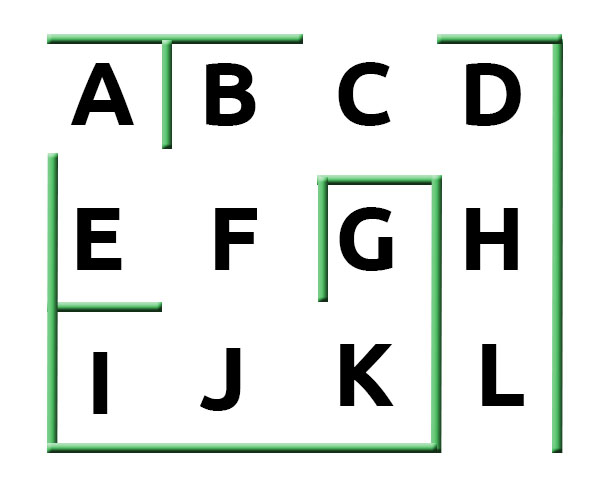
Our client has asked us to implement an algorithm. This robot has to run through a warehouse in the most efficient way possible. This is de warehouse plan:
A Q-learning algorithm must be applied. This is a model-free reinforcement learning algorithm.
Q-learning is a values-based learning algorithm. Value based algorithms updates the value function based on an equation(particularly Bellman equation). Whereas se sign column(bar) the other type, policy-based estimates the value function with a greedy policy obtained from the last policy improvement.
Q-learning uses Temporal Differences(TD) to estimate the value of $Q(s,a)$. Temporal difference is an agent learning from an environment through episodes with no prior knowledge of the environment:

The Q-function uses the Bellman equation:

- You can get more information about Q-learning from here: A Beginners Guide to Q-Learning
1 Import Libraries
import numpy as np
2 Configuration of  coefficent*(Discount Rate)* and
coefficent*(Discount Rate)* and  coefficent*(Learning Rate)*
coefficent*(Learning Rate)*
gamma = 0.75 alpha = 0.9
3 Definition of the environment
3.1 Definition of the states
The state is the location of our robot in the warehouse.
location_to_state = {'A': 0,
'B': 1,
'C': 2,
'D': 3,
'E': 4,
'F': 5,
'G': 6,
'H': 7,
'I': 8,
'J': 9,
'K': 10,
'L': 11}
Definition of actions
The action is the next position where our robot can move.
actions = [0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11]
Definition of rewards
We define the rewards, creating a reward matrix, where the rows correspond to current states 







– Columns are The action and the rows are The State:
R = np.array([[0,0,0,0,1,0,0,0,0,0,0,0], # A
[0,0,1,0,0,1,0,0,0,0,0,0], # B
[0,1,0,1,0,0,0,0,0,0,0,0], # C
[0,0,1,0,0,0,0,1,0,0,0,0], # D
[1,0,0,0,0,1,0,0,0,0,0,0], # E
[0,1,0,0,1,0,0,0,0,1,0,0], # F
[0,0,0,0,0,0,0,0,0,0,1,0], # G
[0,0,0,1,0,0,0,0,0,0,0,1], # H
[0,0,0,0,0,0,0,0,0,1,0,0], # I
[0,0,0,0,0,1,0,0,1,0,1,0], # J
[0,0,0,0,0,0,1,0,0,1,0,0], # K
[0,0,0,0,0,0,0,1,0,0,0,0]])# L
4 Building a AI with Q-learning
– Inverse transformation from states to locations (1,2,3,…)—>(A,B,C,…):
state_to_location = {state : location for location, state in location_to_state.items()}
print(state_to_location)
– Create a final function that returns us the optimal route:
def route(starting_location, ending_location):
R_new = np.copy(R)
ending_state = location_to_state[ending_location]
R_new[ending_state, ending_state] = 1000 #to give 1000(points) to the final state
Q = np.array(np.zeros([12, 12])) #Q-value
for i in range(1000):
current_state = np.random.randint(0, 12)#random number between 0-12
playable_actions = []
for j in range(12): #thorugh the columns
if R_new[current_state, j] > 0:
playable_actions.append(j)
next_state = np.random.choice(playable_actions) #current_action
TD = R_new[current_state, next_state] + gamma*Q[next_state, np.argmax(Q[next_state,])] - Q[current_state, next_state] #Temporal Diferences(TD)
Q[current_state, next_state] = Q[current_state, next_state] + alpha*TD #Bellman equation
route = [starting_location]
next_location = starting_location
while(next_location != ending_location):
starting_state = location_to_state[starting_location]
next_state = np.argmax(Q[starting_state, ])
next_location = state_to_location[next_state]
route.append(next_location)
starting_location = next_location
return route
5 Final function
def best_route(starting_location, intermediary_location, ending_location):
return route(starting_location, intermediary_location) + route(intermediary_location, ending_location)[1:]
print("Chosen route:")
print(best_route('L', 'B', 'G'))
Chosen route: ['L', 'H', 'D', 'C', 'B', 'F', 'J', 'K', 'G']
We can check in our plan that this route is right.