[This work is based on this course: Artificial Intelligence for Business.]
We will configure our own server environment and build an AI that will control the cooling/heating of the server to keep it in an optimal temperature range and at the same time we need to save the maximum energy, thus minimizing costs. Our goal will be to achieve at least 40% energy savings.
1 – Boundary Conditions and program operation
– Parameters:
- The average atmospheric temperature for a month.
- The optimal range of server temperature: [15ºC, 25ºC].
- The minimum server temperature: -25ºC (it doesn’t operate below).
- The maximum server temperature: 80ºC (it doesn’t work above).
- The minimum number of users on the server: 8.
- The maximum number of users on the server: 120.
- The maximum number of users on the server that it can up or down per minute: 6.
- The minimum data transmission rate on the server: 20.
- The maximum data transmission speed on the server: 400.
- The maximum data transmission speed that can go up or down per minute: 10.
– Variables:
- Server temperature at any time.
- Number of users on the server at any time.
- Data transmission speed at any minute
- AI’s energy expended on the server (to cool or heat it) at any time.
- The energy expended by the server’s integrated cooling system that automatically brings the server temperature to the optimal range whenever the server temperature is out of this optimal range.
We are going to make two assumptions to facilitate the work:
- First, the server temperature can be approximated by Multiple Linear Regression:

where 

When the atmospheric temperature rieses, the server temperature rises too. The more users are active on the server, the more the server will spend to handle them, and therefore the server temperature will be higher. And finally, the more data is transmitted within the server, the more the server will spend to process it, and therefore the higher the server temperature will be. And for simplicity, we just assume these correlations are linear.
We are going to give values to parameters:

- Second, the energy expended by our system (IA or IRS) that changes the server
temperature from
to
in a unit of time (1 minute in our problem), it can be approximated again by linear function regression of the absolute change in server temperature:

Where:
is the energy expended by the system between
and
.
is the change of temperature of the system between $t$ and
and
. Although we put them like
and
(for example).
Finnaly we have:

si
, (the server heats up)
si
, (the server gets cold)
How the simulation works:
We are going to simulate a real server and for that the number of users and data transmission speed will fluctuate randomly. AI has to understand how much cooling and heating power it must transfer to server. In this way the program must be able to spend the least energy optimizing its heat transfer.
General operation:
Two possible systems can regulate the server temperature: the AI or the server’s integrated cooling system. The integrated server cooling system is a non- intelligent system. This system will automatically return the server temperature to its optimal temperature. The integrated system(no-IA) works only when IA system not work. If IA is enabled, no-IA is disabled and then the IA updates the server temperature. The IA system is non-deterministic because it predicts what temperatureto set based on the previous parameters.
The IA must spend less energy than the intern cooling system. Therefore we can see in the second assumption the energy is proportional to temperature.
The energy saved by IA every time (1 minute) is:
IA Energy saved between t y


Our goal is to save the maximum energy every minute, thus save the maximum total energy for 1 whole simulation year, and finally save the maximum costs on the cooling/heating electricity bill.
Now let’s to define the states, actions and rewards. (You can get more information about Q-learning from here: A Beginners Guide to Q-Learning)
States
The state 
- Server temperature in time t.
- Number users in t.
- Data transmission speed in t.
Actions
-
0: IA cools the server 3ºC (- 3ºC).
-
1: IA cools the server 1.5ºC (- 1.5ºC).
-
2: IA makes no difference.
-
3: IA heats up the server 1.5ºC (+ 1.5ºC).
-
4: IA heats up the server 3ºC (+ 3ºC).
Rewards
The reward is the energy expended on the server that the AI is saving relative to the server’s intern cooling system (no-IA):

Then:


2 – Deep Q-Learning algorithm
For each state
is the prediction and we choose
with argmax or softmax (https://deepai.org/machine-learning-glossary-and-terms/softmax-layer).
- The target value is:
, where
is the reward, and
is the discount factor (https://en.wikipedia.org/wiki/Q-learning#Discount_factor)
- Loss error between the prediction and the target is:
, where
. This loss error spreads to net back and weights are update.
Other problem to solve, 
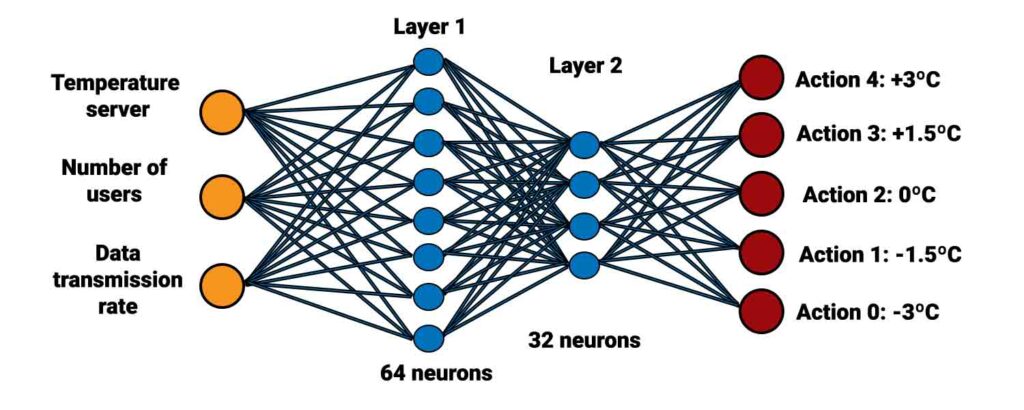
Our brain will have 64 neurons in the first layer and 32 neurons in second layer. This neural network takes the environment’s states as inputs and returns the Q-values for each of the 5 actions as outputs. This artificial brain will be trained with a "mean square error" loss (MSE) and an Adam optimizer.
<img src="Recursos/er_neuronal.jpg" width="800">
Algorithm steps:
First we need to start the Expereince Replay like a empty list M. Then:
1 – 
2 – We execute the maximum Q-values acttion:

3 – We get the Reward: 
4 – Next state
5 – Update Experience Replay memory (M) with 
6 – We select a random block transitions 

Algorithm implementation:
1 – Building the environment.
2 – Builiding the brain.
3 – Deep Reinforcement Learning algorithm.
4 – Training the IA.
5 – Testing the IA.
Environment
We are going to create teh environment into a class called Environment. This class contains 4 methods, the class’s constructor method (init()), a method to update the environment (update_env()(…)), a method to reset the environment (rest(…)) and finnaly a method to give us information about some variables (observe(…)).
– The general structure will be:
# Import libraries
import numpy as np
#Create the class and its methods
class Environment(object):
def __init__(self, optimal_temp, initial_month, initial_number_users, initial_rate_data):
...............
...............
def update_env(self, direction, energy, energy_ai, month):
..............
..............
return next_state, reward, game_over
def reset_env(self, new_month):
.............
.............
def give_env(self):
............
............
return current_state, reward, game_over
1 – Introduction and initialization of environment variables and parameters.
def __init__(self, optimal_temp = (15, 25), initial_month = 0, initial_number_users = 8, initial_rate_data = 80):
#For example, Average Weather in Köln, Germany (https://en.climate-data.org/europe/germany/north-rhine-westphalia/cologne-76/#:~:text=The%20average%20annual%20temperature%20in,%C2%B0C%20%7C%2050.2%20%C2%B0F.)
self.monthly_atmospheric_temp = [1.8, 2.5, 6, 9.5, 13.6, 16.7, 18.3, 18.1, 15.1, 10.5, 6.1, 2.9]
self.initial_month = initial_month
self.atmospheric_temp = self.monthly_atmospheric_temp[initial_month]
self.optimal_temp = optimal_temp
self.min_temp = -25
self.max_temp = 80
self.min_number_users = 8
self.max_number_users = 120
self.max_update_users = 6
self.min_rate_data = 20
self.max_rate_data = 400
self.max_update_data = 10
self.initial_number_users = initial_number_users
self.current_number_users = initial_number_users
self.initial_rate_data = initial_rate_data
self.current_rate_data = initial_rate_data
self.intrinsec_temp = self.atmospheric_temp + 1.3*self.current_number_users+1.3*self.current_rate_data
self.temp_ai = self.intrinsec_temp
self.temp_noai = (self.optimal_temp[0]+self.optimal_temp[1])/2.0
self.total_energy_ai = 0.0
self.total_energy_noai = 0.0
self.reward = 0.0
self.game_over = 0
self.train = 1
2 – Creating a update environment method after the IA performs an action.
def update_env(self, direction, energy_ai, month):
# GETTING THE REWARD
# Energy spended by cooling system server (no-IA)
energy_noai = 0
if(self.temp_noai < self.optimal_temp[0]):
energy_noai = self.optimal_temp[0] - self.temp_noai
self.temp_noai = self.optimal_temp[0]
elif(self.temp_noai > self.optimal_temp[1]):
energy_noai = self.temp_noai - self.optimal_temp[1]
self.temp_noai = self.optimal_temp[1]
# The Reward
self.reward = energy_noai - energy_ai
# Scaled the reward
self.reward = 1e-3*self.reward
# GETTING THE NEXT STATE
# Updating the atmospheric temp
self.atmospheric_temp = self.monthly_atmospheric_temp[month]
# Updating the number of users
self.current_number_users += np.random.randint(-self.max_update_users, self.max_update_users)
if(self.current_number_users < self.min_number_users):
self.current_number_users = self.min_number_users
elif(self.current_number_users > self.max_number_users):
self.current_number_users = self.max_number_users
# Updating the current rate data
self.current_rate_data += np.random.randint(-self.max_update_data, self.max_update_data)
if(self.current_rate_data < self.min_rate_data):
self.current_rate_data = self.min_rate_data
elif(self.current_rate_data > self.max_rate_data):
self.current_rate_data = self.max_rate_data
# Intrinsic temperature variation
past_intrinsic_temp = self.intrinsec_temp #previous temperature
self.intrinsec_temp = self.atmospheric_temp + 1.3*self.current_number_users+1.3*self.current_rate_data
delta_intrinsec_temperaure = self.intrinsec_temp - past_intrinsic_temp
# Temperature variation caused by IA
if(direction==-1): #if temperature down
delta_temp_ai = -energy_ai
elif(direction == 1): #if temperature up
delta_temp_ai = energy_ai
# New server temperature when IA is connected
self.temp_ai += delta_intrinsec_temperaure + delta_temp_ai
# New server temperature when IA is disabled
self.temp_noai += delta_intrinsec_temperaure
# GETTING THE GAME OVER
if(self.temp_ai < self.min_temp):
if(self.train == 1):
self.game_over = 1
else:
self.total_energy_ai += self.optimal_temp[0] - self.temp_ai
self.temp_ai = self.optimal_temp[0]
if(self.temp_ai > self.max_temp):
if(self.train == 1):
self.game_over = 1
else:
self.total_energy_ai += self.temp_ai - self.optimal_temp[1]
self.temp_ai = self.optimal_temp[1]
# UPDATING THE SCORES
# Total Energy spends by IA
self.total_energy_ai += energy_ai
# Total Energy spends by no-IA (without IA)
self.total_energy_noai += energy_noai
# SCALING NEXT STATE
scaled_temp_ai = (self.temp_ai - self.min_temp)/(self.max_temp - self.min_temp)
scaled_number_users = (self.current_number_users - self.min_number_users)/(self.max_number_users - self.min_number_users)
scaled_rate_data = (self.current_rate_data - self.min_rate_data)/(self.max_rate_data - self.min_rate_data)
next_state = np.matrix([scaled_temp_ai, scaled_number_users, scaled_rate_data])
# RETURN NEXT STATE, REWARD AND GAME OVER
return next_state, self.reward, self.game_over
3 – Creating a reset environment method.
def reset_env(self, new_month):
self.atmospheric_temp = self.monthly_atmospheric_temp[new_month]
self.initial_month = new_month
self.current_number_users = self.initial_number_users
self.current_rate_data = self.initial_rate_data
self.intrinsec_temp = self.atmospheric_temp + 1.3*self.current_number_users+1.3*self.current_rate_data
self.temp_ai = self.intrinsec_temp
self.temp_noai = (self.optimal_temp[0]+self.optimal_temp[1])/2.0
self.total_energy_ai = 0.0
self.total_energy_noai = 0.0
self.reward = 0.0
self.game_over = 0
self.train = 1
4 – Creating a method who gives us the state, the reward and the end of the game any moment.
def give_env(self):
scaled_temp_ai = (self.temp_ai - self.min_temp)/(self.max_temp - self.min_temp)
scaled_number_users = (self.current_number_users - self.min_number_users)/(self.max_number_users - self.min_number_users)
scaled_rate_data = (self.current_rate_data - self.min_rate_data)/(self.max_rate_data - self.min_rate_data)
current_state = np.matrix([scaled_temp_ai, scaled_number_users, scaled_rate_data])
return current_state, self.reward, self.game_over
The Brain
We are going to build a neuronal network like this:
Import the libraries:
from keras.layers import Input, Dense, Dropout from keras.models import Model from keras.optimizers import Adam
Building the brain:
class Brain(object): def __init__(self, learning_rate = 0.001, number_actions = 5): self.learning_rate = learning_rate # INPUT LAYER FORMED BY INPUT STATES states = Input(shape = (3,)) # TWO HIDDEN LAYERS TOTALLY CONNECTED x = Dense(units = 64, activation = 'sigmoid')(states) x = Dropout(rate = 0.1)(x) #during training in each iteration 10% of neurons will be randomly turned off y = Dense(units = 32, activation = 'sigmoid')(x) y = Dropout(rate = 0.1)(y) #during training in each iteration 10% of neurons will be randomly turned off # OUTPUT LAYER TOTALLY CONNECTED TO THE LAST HIDDEN LAYER q_values = Dense(units = number_actions, activation = 'softmax')(y) # JOINING KERAS MODEL self.model = Model(inputs = states, outputs = q_values) # COMPILING THE MODEL WITH THE MEAN SQUARE ERROR LOSS FUNCTION(MSE) AND THE OPTIMIZER (Adam) self.model.compile(loss = 'mse', optimizer = Adam(lr = learning_rate))
Deep Reinforcement Learning Algorithm(DQN)
Import libraries:
import numpy as np
Algorithm Implementation:
class DQN(object):
# INICIALIZATION DQN PARAMETERS
def __init__(self, max_memory = 100, discount_factor = 0.9):
self.memory = list()
self.max_memory = max_memory
self.discount_factor = discount_factor #gamma factor
# BUILDING A EXPERIENCE DELAY MEMORY
def remember(self, transition, game_over):
self.memory.append([transition, game_over])
if len(self.memory) > self.max_memory:
del self.memory[0]
# BUILDING A METHOD THAT BUILDS TWO INPUTS AND TARGETS BLOCKS AND EXTRACTING THE MEMORY'S TRANSITIONS
def get_batch(self, model, batch_size = 10):
len_memory = len(self.memory)
num_inputs = self.memory[0][0][0].shape[1]
num_outputs = model.output_shape[-1]
inputs = np.zeros((min(batch_size, len_memory), num_inputs))
targets = np.zeros((min(batch_size, len_memory), num_outputs))
for i, idx in enumerate(np.random.randint(0, len_memory, size=min(len_memory, batch_size))):
current_state, action, reward, next_state = self.memory[idx][0] #we want the memory's transition
game_over = self.memory[idx][1]
inputs[i] = current_state
targets[i] = model.predict(current_state)[0]
Q_sa = np.max(model.predict(next_state)[0])
if game_over:
targets[i, action] = reward
else:
targets[i, action] = reward + self.discount_factor*Q_sa
return inputs, targets
Training the IA
Import python libraries and our libraries:
import os import numpy as np import random as rn import environment import brain import dqn
Reproducibility seeds setup:
os.environ['PYTHONHASHSEED'] = '0' np.random.seed(85) rn.seed(12345)
Parameters:
epsilon = 0.3 #our system will take 30% exploration(action random selection) and 70% explotation number_actions = 5 direction_boundary = (number_actions -1)/2 #intermediate point (our boundary) number_epochs = 100 max_memory = 3000 batch_size = 512 temp_step = 1.5
Building the environment with a class object Environment()
env = environment.Environment(optimal_temp = (15.0, 25.0), initial_month = 0, initial_number_users = 18, initial_rate_data = 32)
Building the brain with a class object Brain()
brain = brain.Brain(learning_rate = 0.00001, number_actions = number_actions)
Building DQN model with a class object DQN()
dqn = dqn.DQN(max_memory = max_memory, discount_factor = 0.9)
Choosing training mode
train = True
IA training
env.train = train
model = brain.model
early_stopping = True
patience = 10
best_total_reward = -np.inf
patience_count = 0
if (env.train):
# STARTING EPOCH BUCLE (1 Epoch = 5 Mouths)
for epoch in range(1, number_epochs):
# STARTING ENVIRONMEN VARIABLES AND TRAINING BUCLE
total_reward = 0
loss = 0.
new_month = np.random.randint(0, 12)
env.reset_env(new_month = new_month)
game_over = False
current_state, _, _ = env.give_env() #we only want current_state return from give_env method
timestep = 0
# INICIALIZATION TIMESTEPS BUCLE(Timestep = 1 minute) AT ONE EPOCH
while ((not game_over) and timestep <= 5 * 30 * 24 * 60):
# RUNNING NEXT ACTION BY EXPLORATION
if np.random.rand() <= epsilon:
action = np.random.randint(0, number_actions)
if (action - direction_boundary < 0):
direction = -1
else:
direction = 1
energy_ai = abs(action - direction_boundary) * temp_step
# RUNNING NEXT ACTION BY EXPLOTATION
else:
q_values = model.predict(current_state)
action = np.argmax(q_values[0])
if (action - direction_boundary < 0):
direction = -1
else:
direction = 1
energy_ai = abs(action - direction_boundary) * temp_step
# UPDATING ENVIRONMENT AND REACHING NEXT STATE
next_state, reward, game_over = env.update_env(direction, energy_ai, int(timestep/(30*24*60)))
total_reward += reward
# SAVING NEW TRANSITION IN MEMORY
dqn.remember([current_state, action, reward, next_state], game_over)
# GETTING INPUTS AND TARGETS BLOCKS
inputs, targets = dqn.get_batch(model, batch_size)
# CALCULATING LOOST FUNCTION WITH THE WHOLE INPUT AND TARGET BLOCK
loss += model.train_on_batch(inputs, targets)
timestep += 1
current_state = next_state
# PRINTING RESULTS AT THE END OF EPOCH
print("\n")
print("Epoch: {:03d}/{:03d}.".format(epoch, number_epochs))
print(" - Total Energy spended by IA: {:.0f} J.".format(env.total_energy_ai))
print(" - Total Energy spended by no-IA: {:.0f} J.".format(env.total_energy_noai))
# EARLY STOPPING
if early_stopping:
if (total_reward <= best_total_reward):
patience_count += 1
else:
best_total_reward = total_reward
patience_count = 0
if patience_count >= patience:
print("Early method execution.")
break
# Saving model for the future
model.save("model.h5")
Epoch: 001/100. - Total Energy spended by IA: 22 J. - Total Energy spended by no-IA: 29 J. Epoch: 002/100. - Total Energy spended by IA: 28 J. - Total Energy spended by no-IA: 26 J. Epoch: 003/100. - Total Energy spended by IA: 20 J. - Total Energy spended by no-IA: 39 J. Epoch: 004/100. - Total Energy spended by IA: 4 J. - Total Energy spended by no-IA: 2 J. Epoch: 005/100. - Total Energy spended by IA: 4 J. - Total Energy spended by no-IA: 1 J. Epoch: 006/100. - Total Energy spended by IA: 10 J. - Total Energy spended by no-IA: 12 J. Epoch: 007/100. - Total Energy spended by IA: 22 J. - Total Energy spended by no-IA: 48 J. Epoch: 008/100. - Total Energy spended by IA: 22 J. - Total Energy spended by no-IA: 19 J. Epoch: 009/100. - Total Energy spended by IA: 122 J. - Total Energy spended by no-IA: 181 J. Epoch: 010/100. - Total Energy spended by IA: 3 J. - Total Energy spended by no-IA: 0 J. Epoch: 011/100. - Total Energy spended by IA: 134 J. - Total Energy spended by no-IA: 169 J. Epoch: 012/100. - Total Energy spended by IA: 84 J. - Total Energy spended by no-IA: 59 J. Epoch: 013/100. - Total Energy spended by IA: 252 J. - Total Energy spended by no-IA: 352 J. Epoch: 014/100. - Total Energy spended by IA: 8 J. - Total Energy spended by no-IA: 4 J. Epoch: 015/100. - Total Energy spended by IA: 27 J. - Total Energy spended by no-IA: 77 J. Epoch: 016/100. - Total Energy spended by IA: 8 J. - Total Energy spended by no-IA: 16 J. Epoch: 017/100. - Total Energy spended by IA: 18 J. - Total Energy spended by no-IA: 44 J. Epoch: 018/100. - Total Energy spended by IA: 6 J. - Total Energy spended by no-IA: 2 J. Epoch: 019/100. - Total Energy spended by IA: 8 J. - Total Energy spended by no-IA: 1 J. Epoch: 020/100. - Total Energy spended by IA: 33 J. - Total Energy spended by no-IA: 25 J. Epoch: 021/100. - Total Energy spended by IA: 78 J. - Total Energy spended by no-IA: 131 J. Epoch: 022/100. - Total Energy spended by IA: 706 J. - Total Energy spended by no-IA: 960 J. Epoch: 023/100. - Total Energy spended by IA: 50 J. - Total Energy spended by no-IA: 304 J. Epoch: 024/100. - Total Energy spended by IA: 8 J. - Total Energy spended by no-IA: 34 J. Epoch: 025/100. - Total Energy spended by IA: 0 J. - Total Energy spended by no-IA: 0 J. Epoch: 026/100. - Total Energy spended by IA: 4 J. - Total Energy spended by no-IA: 61 J. Epoch: 027/100. - Total Energy spended by IA: 86 J. - Total Energy spended by no-IA: 282 J. Epoch: 028/100. - Total Energy spended by IA: 32 J. - Total Energy spended by no-IA: 148 J. Epoch: 029/100. - Total Energy spended by IA: 21 J. - Total Energy spended by no-IA: 67 J. Epoch: 030/100. - Total Energy spended by IA: 8 J. - Total Energy spended by no-IA: 41 J. Epoch: 031/100. - Total Energy spended by IA: 6 J. - Total Energy spended by no-IA: 7 J. Epoch: 032/100. - Total Energy spended by IA: 20 J. - Total Energy spended by no-IA: 61 J. Epoch: 033/100. - Total Energy spended by IA: 24 J. - Total Energy spended by no-IA: 189 J. Early method execution.
Testing the IA
Import python libraries and our libraries:
import os import numpy as np import random as rn from keras.models import load_model import environment
STTING UP SEEDS OF REPRODUCIBILITY
os.environ['PYTHONHASHSEED'] = '0' np.random.seed(85) rn.seed(12345)
SETTING UP PARAMETERS
number_actions = 5 direction_boundary = (number_actions -1)/2 temp_step = 1.5
BUILDING ENVIERONMENT WITH A CLASS OBJECT ENMIRONMENT()
env = environment.Environment(optimal_temp = (15.0, 25.0), initial_month = 0, initial_number_users = 18, initial_rate_data = 32)
LOADING THE MODEL
model = load_model("model.h5")
CHOOSING THE TRAINING MODEL (=False)
train = False
RUNNING A YEAR SIMULATION (EXPLOTATION)
env.train = train
current_state, _, _ = env.give_env()
for timestep in range(0, 12*30*24*60):
q_values = model.predict(current_state)
action = np.argmax(q_values[0])
if (action < direction_boundary):
direction = -1
else:
direction = 1
energy_ai = abs(action - direction_boundary) * temp_step
next_state, reward, game_over = env.update_env(direction, energy_ai, int(timestep/(30*24*60)))
current_state = next_state
PRINTING RESULTS AT THE END OF EPOCH
print("\n")
print(" - Total Energy spended by IA: {:.0f} J.".format(env.total_energy_ai))
print(" - Total Energy spended by no-IA: {:.0f} J.".format(env.total_energy_noai))
print("--------------------------------------------------")
print(" ENERGY SAVED: {:.0f} %.".format(100*(env.total_energy_noai-env.total_energy_ai)/env.total_energy_noai))
- Total Energy spended by IA: 382928 J. - Total Energy spended by no-IA: 1595671 J. -------------------------------------------------- ENERGY SAVED: 76 %.